




準(zhǔn)版-1-560x365.png)

題-1.png)





UP NEXT
轉(zhuǎn)載丨今日資本、軟銀愿景聯(lián)合領(lǐng)投,高仙機(jī)器人完成12億元C輪融資2021-11-10
產(chǎn)品
配套硬件
2021-11-23
2021年11月23日
近日,高仙機(jī)器人SLAM團(tuán)隊(duì)的研究成果在機(jī)器人領(lǐng)域頂級(jí)學(xué)術(shù)會(huì)議IROS 2021上發(fā)表。
IROS全稱(chēng) IEEE/RSJ International Conference on Intelligent Robots and Systems (智能機(jī)器人與系統(tǒng)國(guó)際會(huì)議),主要展示人工智能和機(jī)器人領(lǐng)域的最新研究進(jìn)展(https://www.iros2021.org/)。
本期高仙技術(shù)家向大家分享這篇入選IROS的SLAM論文,該論文提出了一種應(yīng)對(duì)動(dòng)態(tài)環(huán)境變化的長(zhǎng)期定位與建圖方法,該方法引入一種高效的動(dòng)態(tài)地圖更新機(jī)制,用于解決在變化環(huán)境下(如超市、商場(chǎng)、車(chē)庫(kù)等)的定位跳動(dòng)和丟失問(wèn)題。從而大大提高了機(jī)器人在動(dòng)態(tài)變化場(chǎng)景的適用性。
論文基本信息
標(biāo)題:《A General Framework for Lifelong Localization and Mapping in Changing Environment》
作者:Min Zhao, Xin Guo, Le Song, Baoxing Qin, Xuesong Shi, Gim Hee Lee, Guanghui Sun
來(lái)源:2021 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS2021)
論文鏈接:https://arxiv.org/abs/2111.10946
文章簡(jiǎn)介
在前一篇文章從機(jī)器人落地角度談?wù)処CRA2020對(duì)SLAM研究的啟發(fā),筆者介紹了SLAM的落地難點(diǎn)和相關(guān)進(jìn)展,其中由于環(huán)境的變化,當(dāng)前幀點(diǎn)云與預(yù)先建立的地圖無(wú)法正確匹配建立約束(constraint),引入錯(cuò)誤的約束信息或者無(wú)法建立有效約束,從而導(dǎo)致定位偏斜和定位丟失,因此極大地影響機(jī)器人的正常使用。
為了克服環(huán)境變化,我們提出了一種lifelong SLAM的方法。基于通用的圖優(yōu)化SLAM框架,增加了動(dòng)態(tài)地圖自動(dòng)更新機(jī)制。更新的地圖與實(shí)際場(chǎng)景保持同步,從而保證在定位過(guò)程中點(diǎn)云和地圖始終建立有效的約束,從而克服定位偏斜和丟失。
基于上述問(wèn)題和考慮,本文提出了一種通用的lifelong SLAM框架,相對(duì)于已有的lifelong方法,主要的貢獻(xiàn)點(diǎn)包括:
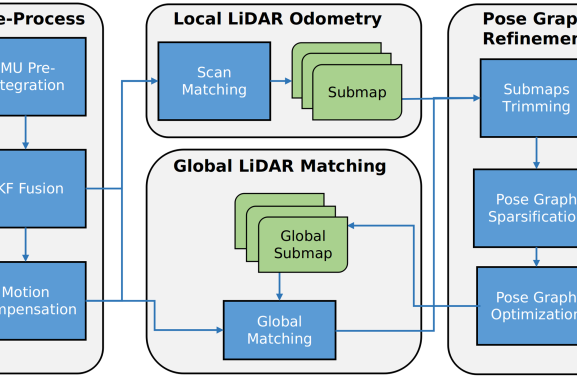
系統(tǒng)架構(gòu)

圖1. lifelong SLAM 系統(tǒng)框圖
圖1給出了系統(tǒng)架構(gòu)圖,主要包含6大模塊,分別為:
地圖更新
地圖更新過(guò)程

圖2. 地圖更新過(guò)程圖示
本文針對(duì)lifelong SLAM問(wèn)題引入session概念,具體更新過(guò)程如圖2所示。第一次建圖屬于session 0,此時(shí)系統(tǒng)處于建圖階段(mapping stage),構(gòu)建了當(dāng)前環(huán)境的地圖描述,并存入數(shù)據(jù)庫(kù)。在機(jī)器人執(zhí)行任務(wù)時(shí),進(jìn)入定位模式,每次定位會(huì)從數(shù)據(jù)庫(kù)讀取地圖數(shù)據(jù),并加載到內(nèi)存,創(chuàng)建新session(session 1~n),定位過(guò)程中根據(jù)圖1的算法,不斷將新生成的submap添加到當(dāng)前session,同時(shí)刪除舊session的submap。在刪除舊submap時(shí),觸發(fā)位姿圖的稀疏化和位姿優(yōu)化。最后在結(jié)束定位任務(wù)時(shí),調(diào)用接口保存更新的地圖,并傳入數(shù)據(jù)庫(kù),從而完成一次地圖更新。經(jīng)過(guò)多次地圖更新后,地圖中包含多條session,每條session由一定數(shù)量的node、submap和約束信息構(gòu)成。
位姿圖稀疏化和優(yōu)化
submap稀疏化
由于地圖更新需要考慮刪除舊submap,簡(jiǎn)單粗暴的方法是直接在位姿圖中,將submap和附屬的node、約束信息刪除,其帶來(lái)的問(wèn)題是整個(gè)圖將會(huì)丟失該submap的所有信息,因此在刪除數(shù)據(jù)時(shí),需要盡可能的在刪除該submap時(shí),將信息轉(zhuǎn)移并保存到位姿圖中,并用于后面的優(yōu)化。
為了達(dá)到稀疏化的目的,考慮將submap和附屬的node視為因子圖(factor graph)的一個(gè)節(jié)點(diǎn)(node),constraint視為因子圖的因子(factor),在刪除submap時(shí),對(duì)被刪的submap及其附屬數(shù)據(jù)進(jìn)行一次邊緣化(marginalization),同時(shí)為了消除邊緣化帶來(lái)的dense fill in問(wèn)題,我們根據(jù)Chow-Liu Tree最大互信息原則保留了信息量最多的變量對(duì),同時(shí)剔除其他的變量。圖3給出了整個(gè)稀疏化的流程(具體符號(hào)含義可以參考“符號(hào)介紹“小節(jié)):

圖3. 基于Chow-Liu Tree最大互信息的地圖稀疏化流程
位姿圖優(yōu)化
在完成一次地圖稀疏化后,需要進(jìn)行一次全局優(yōu)化,即PGR的Pose Graph Optimization的過(guò)程。該部分方法與其他SLAM后端差異不大,本質(zhì)是創(chuàng)建一個(gè)無(wú)約束優(yōu)化問(wèn)題,優(yōu)化的目標(biāo)是調(diào)整submap和node的位姿,使得公式1的代價(jià)函數(shù)最小:
公式1
其中,,由下式得到:

公式2
符號(hào)介紹
使用,,分別表示節(jié)點(diǎn)(node)的位姿、submap位姿和約束信息。是的集合,為node的ID,表示session ID。類(lèi)似的,submap構(gòu)成。對(duì)于,本文出現(xiàn)三種約束:
1.:node到submap的約束,即node到submap的相對(duì)位姿觀(guān)測(cè),由點(diǎn)云到submap匹配計(jì)算得到,為約束的協(xié)方差矩陣,表示觀(guān)測(cè)的不確定性;
2.:node到node的約束,即node到node的相對(duì)位姿觀(guān)測(cè),由位姿圖稀疏化時(shí)獲得,為約束的協(xié)方差矩陣;
3.:submap到submap的約束,即submap到submap的相對(duì)位姿觀(guān)測(cè),由位姿圖稀疏化時(shí)得到,為約束的協(xié)方差矩陣;
實(shí)驗(yàn)結(jié)果
為了驗(yàn)證算法的有效性,本文在北京某商場(chǎng)進(jìn)行了長(zhǎng)達(dá)一個(gè)月的有效性測(cè)試,構(gòu)建了超過(guò)1萬(wàn)平的地圖,其中包含550個(gè)submap,用于后續(xù)的地圖更新測(cè)試,測(cè)試的機(jī)器人如圖4所示,型號(hào)為高仙Scrubber 50清潔機(jī)器人:

圖4. 用于測(cè)試的高仙Scrubber 50商用清潔機(jī)器人
地圖更新情況

圖5. 商超地圖前后變化圖

圖6. 實(shí)際變化與地圖對(duì)比
圖5給出了運(yùn)行前后一個(gè)月的地圖變化,(a)為建圖時(shí)地圖,(b)為經(jīng)過(guò)一個(gè)月地圖更新運(yùn)行后的地圖,(c)為兩者的差異。綠色點(diǎn)為環(huán)境中實(shí)際消失的環(huán)境特征,紅色點(diǎn)為新增環(huán)境特征。可以看到本文算法在長(zhǎng)期運(yùn)行下,能夠有效記錄環(huán)境變化,同時(shí)地圖未出現(xiàn)重影和錯(cuò)誤。
定位性能效果

表1. 地圖更新前后的定位性能比較
表1給出了執(zhí)行了25次定位任務(wù)和地圖更新,分別比較了純里程計(jì)、無(wú)地圖更新、地圖更新三種情況下的定位性能,對(duì)于每次定位,藍(lán)點(diǎn)表示初始化成功,藍(lán)線(xiàn)的長(zhǎng)短表示定位任務(wù)執(zhí)行的里程數(shù),中間間斷表示定位丟失。表中左側(cè)百分號(hào)指標(biāo)為正確軌跡的里程比值(參考論文中MRCL,通過(guò)激光與地圖匹配情況計(jì)算獲得),右下側(cè)為初始化成功率(參考論文CRI,通過(guò)統(tǒng)計(jì)初始化成功次數(shù)獲得),可以看到開(kāi)啟地圖更新后,定位精度和定位丟失概率相對(duì)于未開(kāi)啟地圖更新得到顯著提高。

表2. 平均匹配分?jǐn)?shù)比較
表2基于25次地圖更新數(shù)據(jù),與不帶地圖更新的文獻(xiàn)[2]比較了平均匹配分?jǐn)?shù),可以看到由于地圖更新機(jī)制的引入,使得點(diǎn)云和地圖匹配情況更好。
圖6為本文方法和[2]進(jìn)行比較,可以看到本文方法的定位精度更高,未出現(xiàn)定位跳動(dòng)等問(wèn)題。

圖7. 與[2]方法的軌跡比較
計(jì)算量評(píng)估
圖7和圖8顯示了在多次地圖更新后,地圖數(shù)據(jù)的變化和計(jì)算量變化情況。在超過(guò)18次的更新后,submap和node數(shù)量得到收斂,同時(shí)CPU和內(nèi)存的占用保證在一定收斂范圍內(nèi),證明本文方法適用于長(zhǎng)期的現(xiàn)場(chǎng)部署。

圖8. 多次更新后地圖數(shù)據(jù)中的submap、node數(shù)量變化

圖9. 多次更新后CPU和內(nèi)存的占用變化
結(jié)語(yǔ)
為了解決長(zhǎng)期運(yùn)行時(shí)環(huán)境變化導(dǎo)致的定位問(wèn)題,本文提出了一種完整的lifelong SLAM框架,基于Chow-Liu Tree互信息最大的submap更新方法,保證地圖數(shù)據(jù)與環(huán)境特征能夠?qū)崟r(shí)同步,在取得高精度定位效果的同時(shí),計(jì)算量也保證在一定范圍內(nèi),適用于大范圍的落地應(yīng)用。
參考引用
高仙SLAM團(tuán)隊(duì)招人啦!
SLAM團(tuán)隊(duì)是高仙機(jī)器人核心算法研發(fā)部門(mén)之一,團(tuán)隊(duì)多年來(lái)自主研發(fā)的多模態(tài)SLAM系統(tǒng),,可運(yùn)行于室內(nèi)外全場(chǎng)景,已支持高仙機(jī)器人6大系列產(chǎn)品在全球43個(gè)國(guó)家和地區(qū)實(shí)現(xiàn)商業(yè)落地,累計(jì)運(yùn)行超過(guò)1.5億公里。
團(tuán)隊(duì)目前依托大量落地場(chǎng)景和數(shù)據(jù),致力于攻克現(xiàn)實(shí)世界中最具挑戰(zhàn)的SLAM問(wèn)題,并通過(guò)智能地圖服務(wù)持續(xù)提升用戶(hù)體驗(yàn)。團(tuán)隊(duì)成員全部來(lái)自國(guó)內(nèi)985高校或海外知名高校,其中多人擁有博士學(xué)位,研究方向覆蓋激光SLAM、視覺(jué)SLAM和深度學(xué)習(xí)。
團(tuán)隊(duì)與國(guó)內(nèi)外多所知名高校展開(kāi)學(xué)術(shù)合作,包括新加坡國(guó)立大學(xué)、清華大學(xué)、上海交通大學(xué)、哈爾濱工業(yè)大學(xué)、西安交通大學(xué)等。其中,與上海交通大學(xué)合作項(xiàng)目“低速無(wú)人系統(tǒng)定位導(dǎo)航技術(shù)與應(yīng)用”榮獲2020年度上海市科學(xué)技術(shù)獎(jiǎng)技術(shù)發(fā)明一等獎(jiǎng)。
團(tuán)隊(duì)長(zhǎng)期招募對(duì)SLAM技術(shù)充滿(mǎn)熱情的全職或?qū)嵙?xí)算法工程師、科學(xué)家、產(chǎn)品經(jīng)理和項(xiàng)目經(jīng)理,以創(chuàng)新拓展技術(shù)邊界,引領(lǐng)行業(yè)發(fā)展。

Step 1/2
Please select the type of business you’d like to have with Gausium.
Choose one item from the list
Step 2/2
Thanks for sharing your preference. Please fill out the form below, and we’ll get in touch shortly.
By clicking “Submit”, I authorize Gausium to contact me. Privacy Policy.
Thank you for filling out the form